Distributed Systems for Robotics
I currently lead the Distributed Systems for Robotics research initiative at the Distributed Systems Group @ InIT (DSY).
Building primarily on the ROS middleware, we address the development of autonomous robot applications catering for high-level robot functionality (e.g., mapping, navigation, perception, manipulation, deliberation, agents) with a focus on distributed systems (e.g., agentic AI, MCP, cloud/edge/fog robotics, multi-agents, multi-robot, simulation, fleet-management, integration with AI services, robot-specific networking and storage). The usage of distributed systems allows to extend the capabilities of robots (computing power, context information, artificial intelligence, …) as well as to manage and coordinate them. Programming frameworks like ROS and automation services enable developers to integrate robots into services without having in-depth knowledge at device level.
Overview
At DSY , we focus on:
- Research: robotics, AI, and distributed systems integration through Innosuisse and EU Horizon Europe projects.
- Education: Teaching robotics, guiding BSc/MSc theses, and hosting impactful workshops.
- Dissemination: Sharing knowledge at meetups, conferences, and topic groups.
Robotic Research Highlights
For a complete list of my publications please refer to my Google Scholar page
ICRA’24
A Method for Multi-Robot Asynchronous Trajectory Execution in MoveIt2 P Stoop, T Ratnayake, G Toffetti 2024 IEEE International Conference on Robotics and Automation (ICRA)
IROS’23 - “Task and Motion Planning: from Theory to Practice” Workshop
https://dyalab.mines.edu/2023/iros-workshop/
A Method for Multi-Robot Asynchronous Trajectory Execution in MoveIt2 P Stoop, T Ratnayake, G Toffetti IROS 2023 Workshop on Task and Motion Planning: from Theory to Practice
IROS’22 - “Cloud and Fog Robotics In The Age of Deep Learning” Workshop
https://sites.google.com/view/iros22-cloud-robotics/
Cloud Native Robotic Applications with GPU Sharing on Kubernetes G Toffetti, L Militano, S Murphy, R Maurer, M Straub IROS 2022 Workshop “Cloud and Fog Robotics In The Age of Deep Learning”
ICRA’21 - “Task-Informed Grasping: Agri-Food manipulation” (TIG-III) Workshop
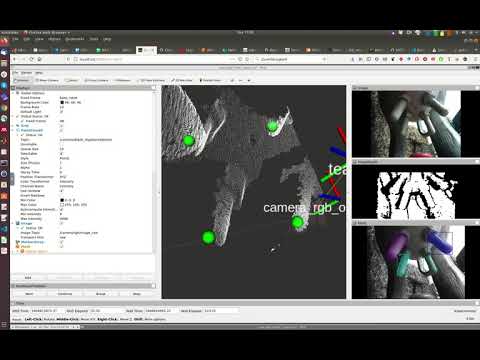
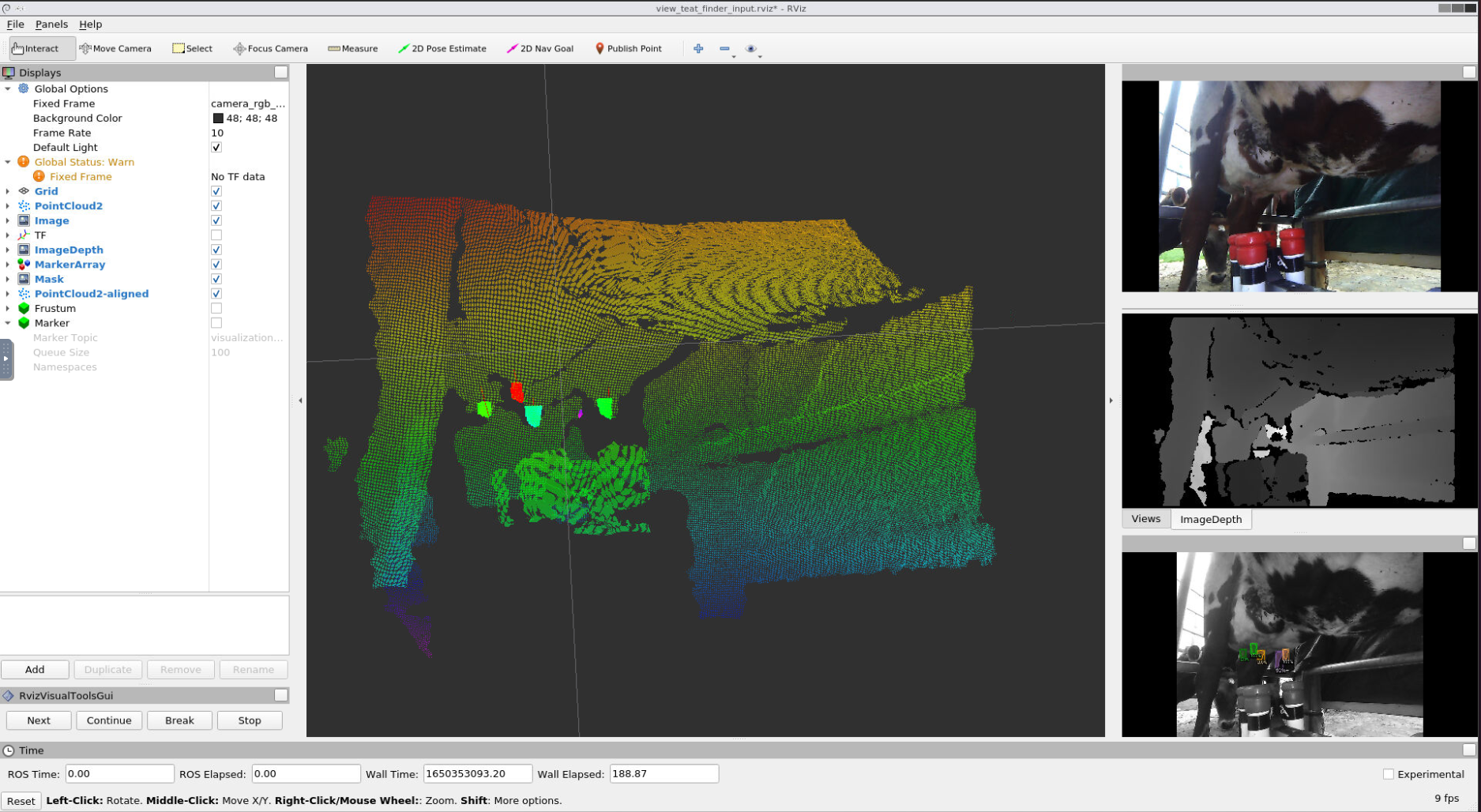
Teat Pose Estimation via RGBD Segmentation for Automated Milking N. Borla, F. Kuster, J. Langenegger, J. Ribera, M. Honegger, G. Toffetti “Task-Informed Grasping: Agri-Food manipulation” (TIG-III) Workshop at ICRA 2021
Projects / Robotic Applications
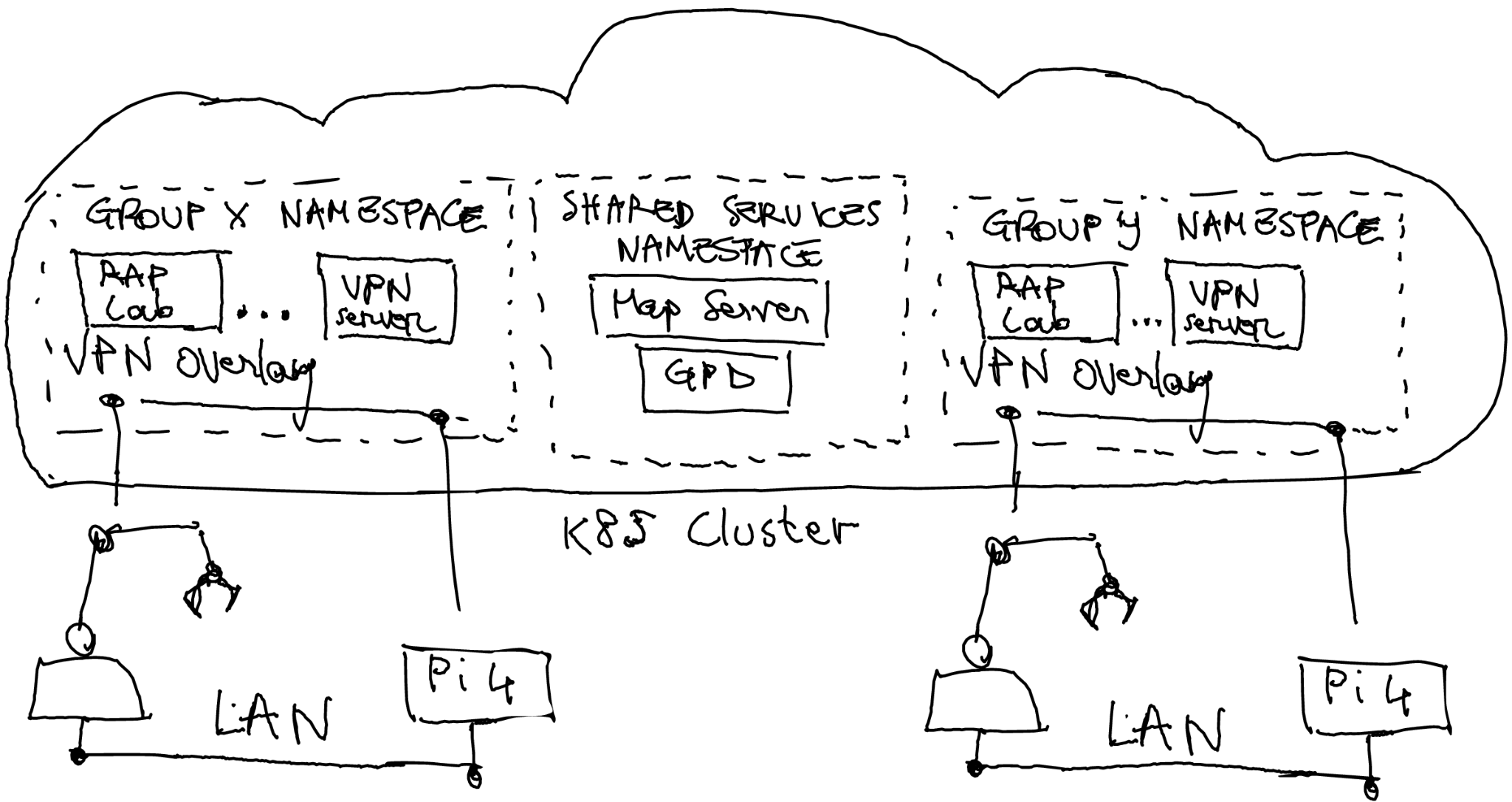
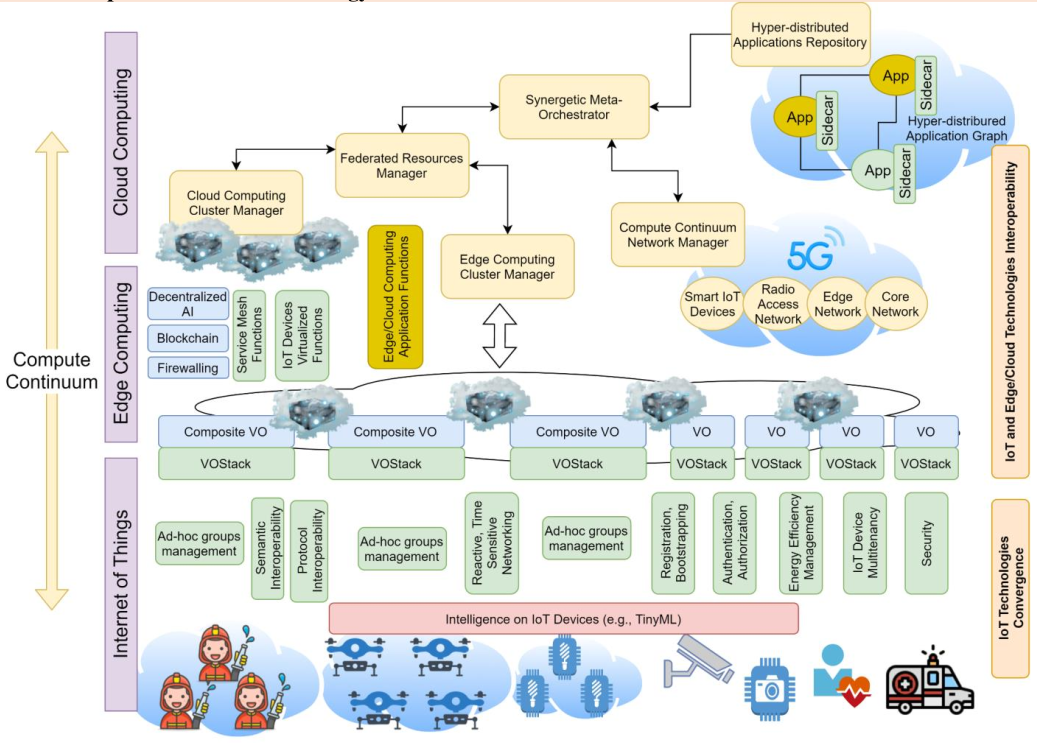
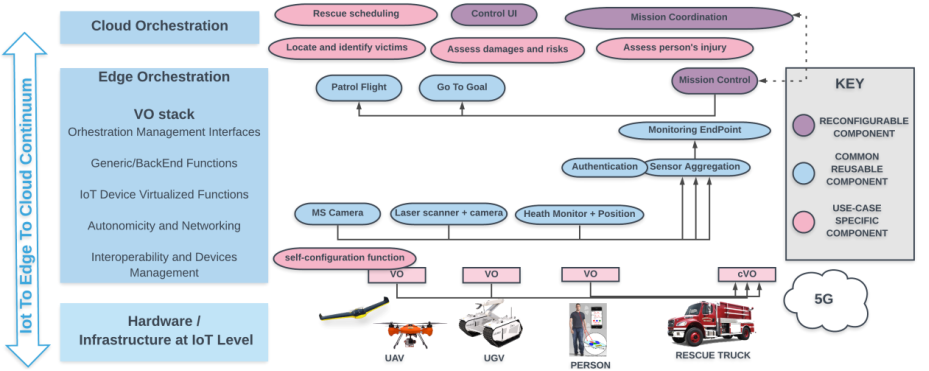
NEPHELE Project (2022-2025) - Ongoing
A lightweight software stack for managing IoT, edge, and cloud computing with use cases like:
- Search and Rescue (SAR): Coordinating emergency responses with a system-of-systems approach.
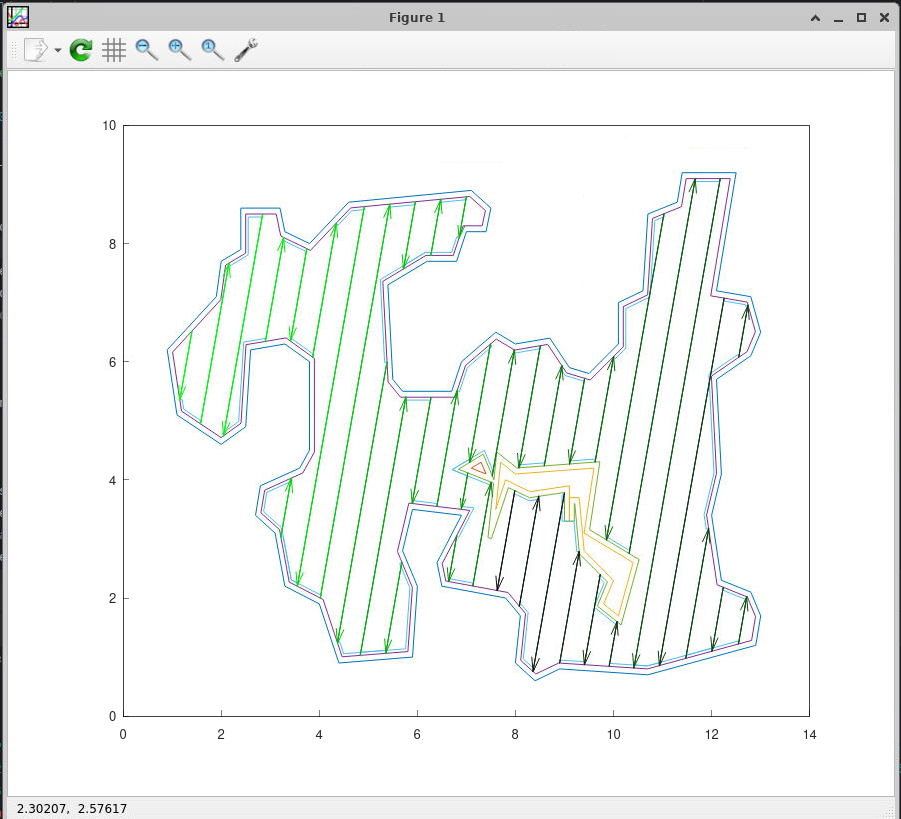
Green Solar Roof Plant-Cutting Robot (2023-2025) - Ongoing
Joint work with the ZHAW Institute of Mechatronic Systems (IMS)
- Main Contributions:
- 3D SLAM and navigation using custom Nav2 behavior trees
- Coverage Planning with Fields2Cover
- AI-based roof life detection
- Cloud-based Fleet Management and teleoperation
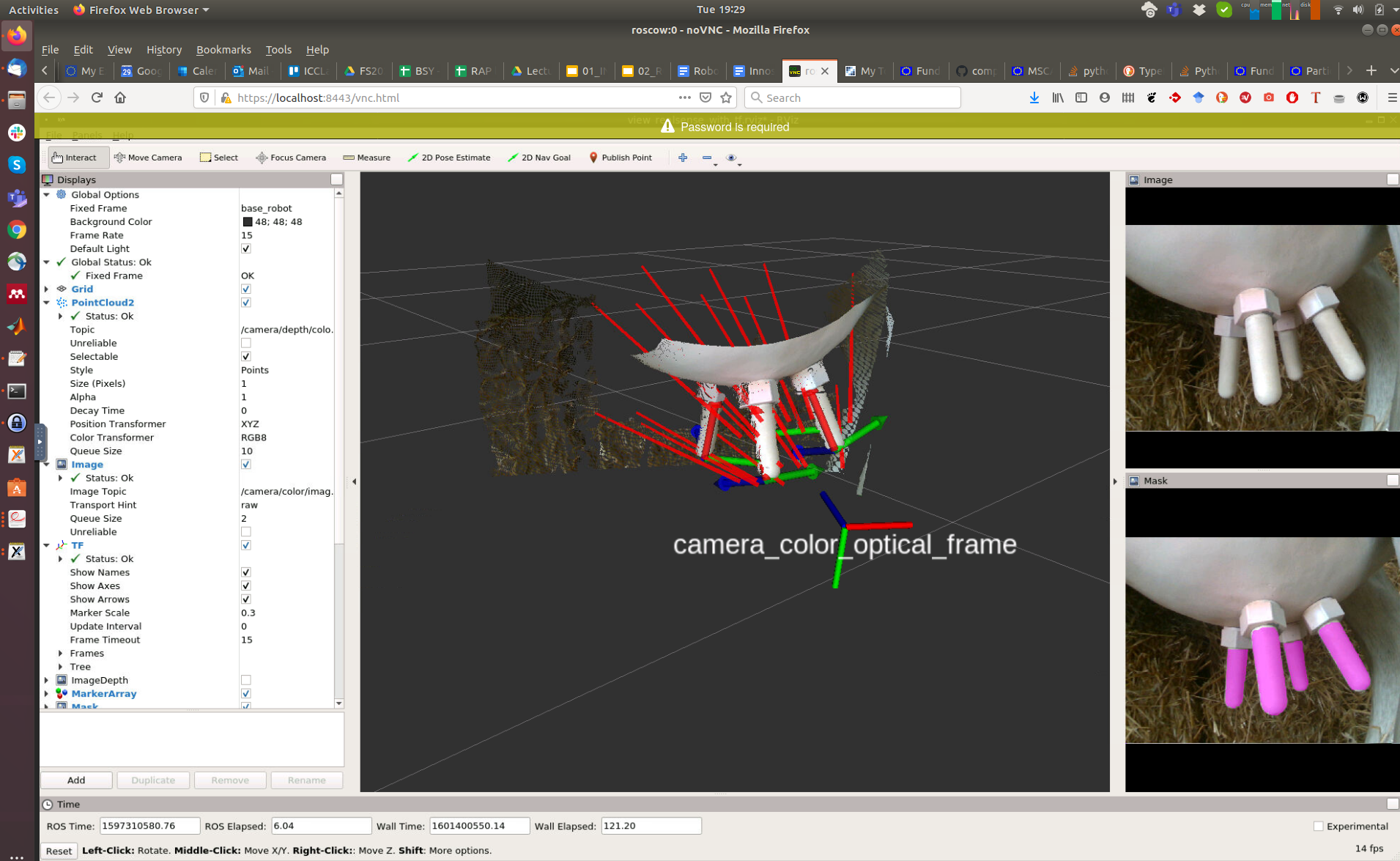
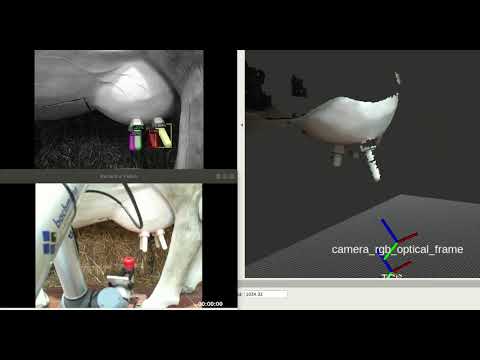
Milking Robot (2019-2021) - Innosuisse Collaboration with ZHAW IMS
Joint work with the ZHAW Institute of Mechatronic Systems (IMS)
- Combines AI, computer vision, and robotics.
- Main Contribution:
- Teat pose estimation using RGBD segmentation.


ECRP with Rapyuta Robotics (2016-2019)
FIWARE & FIROS
- We started working on robotics while working with FIWARE and FIROS to bridge robotics with cloud ecosystems.
- Learn more about FIROS on ROS.org.
BSc and MSc Theses
Recent Examples…
Semantic Mapping with MIT Hydra
Tomato Picking with Mobile Manipulator and Behavior Tree
Search and Rescue with Drones
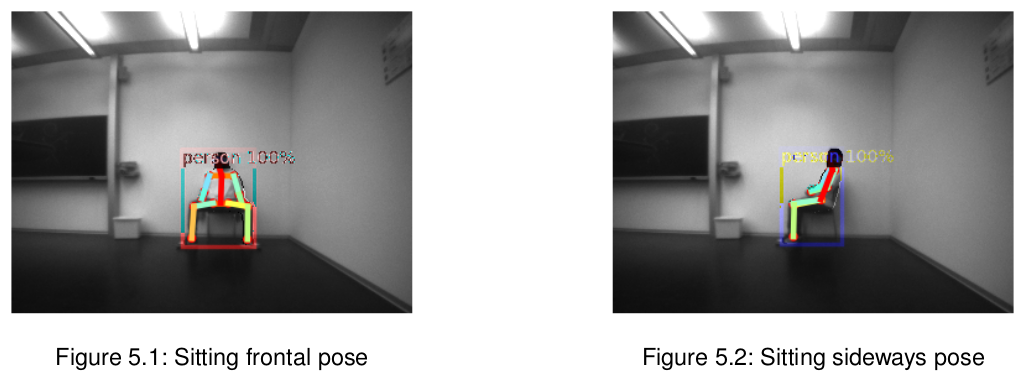
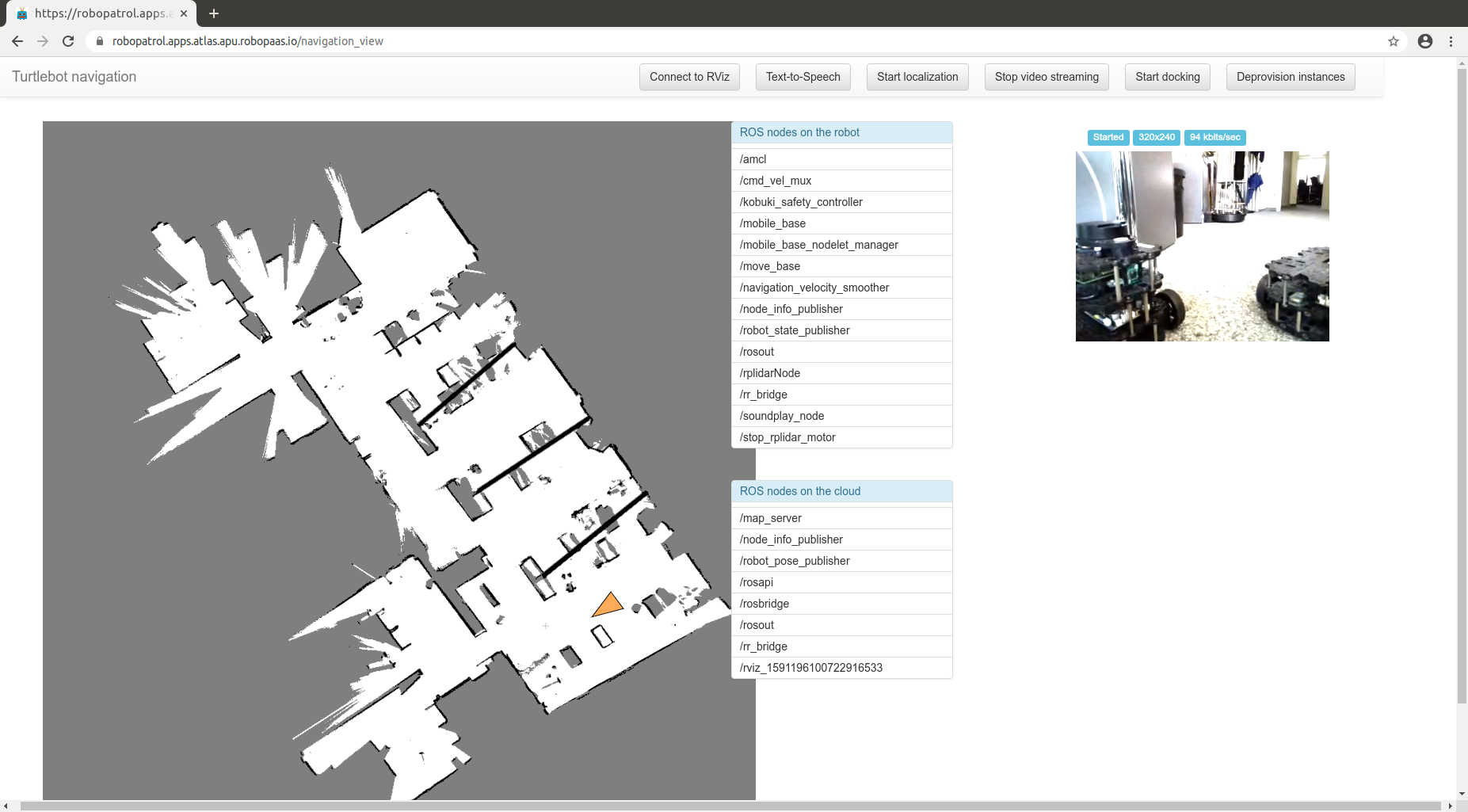
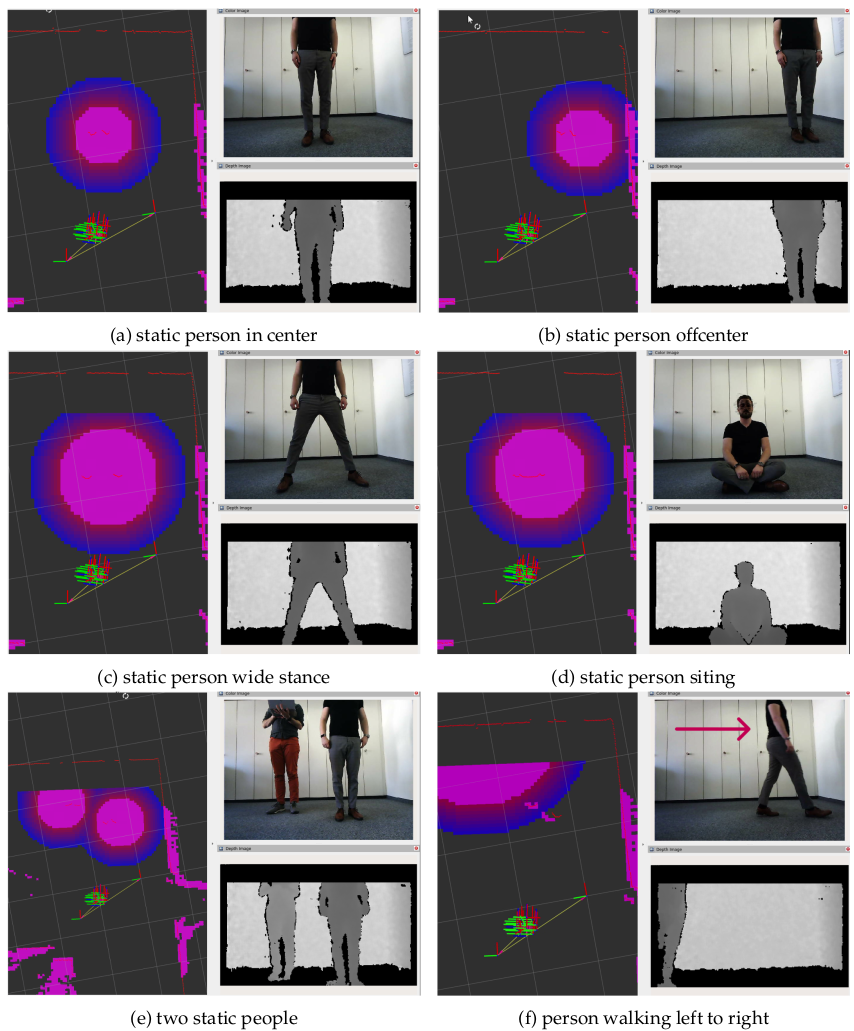
Navigation in Human-Centric Environments
Fleet Management
Coordinating multi-robot systems with Open-RMF.
Education: Robotic Applications Programming (RAP-EN) @ ZHAW
A comprehensive robotics course covering:
- Core Topics:
- ROS 1/2 software development.
- URDF, Xacro, pose in 3D
- ROS Control
- SLAM, motion planning, and perception
- Distributed Robotic Applications
- Practical Labs:
- Challenges in simulation and real-world robots.
- Hardware we Use
| Robot | |
|---|---|
| SUMMIT-XL Steel equipped with: Universal Robots UR5 arm; Schunk and Robotiq grippers; Intel Realsense D435 camera and front/back LIDARs. |  |
| TurtleBot 2 (2x): LIDAR, Jetson, Astra Depth Camera, and auto-docking. |  |
| TurtleBot 3 (6x) | 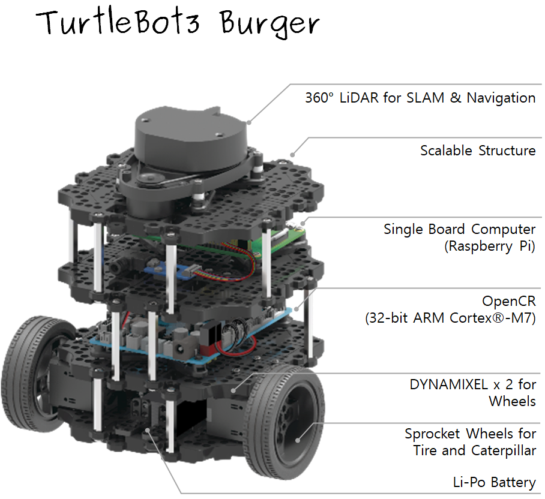 |
| Niryo One (3x) |  |
Community Engagement
- ROS Cloud Robotics WG: core member and mantainer of the Cloud Robotics Hub
- Meetups: Organizing “Robotics and ROS in Zurich” Meetup.
- Workshops:
- Organizer of the EURobotics Cloud Robotics WS at European Robotics Forum (ERF).
Contact Us
For more details, visit our official website: DSY @ InIT / ZHAW.